Inicio / Archivo / Año 7, No 7, septiembre 2024 - agosto 2025 / Paper 05

USO DE UN SIMULADOR ESTOCÁSTICO PARA ANALIZAR EL
CONTROL DE UNA TORRE DE DESTILACIÓN MULTICOMPONENTE
BAJO INCERTIDUMBRE
Mario Luis Chew-Hernández1.*, Raúl Gómez Gómez-Tagle2 y Ricardo Rodríguez-Figueroa3
1-3TECNM: Tecnológico de Estudios Superiores de Coacalco
*mario@tesco.edu.mx
Resumen
La simulación de procesos es ampliamente usada en la enseñanza del diseño y sintonía de controladores de procesos, pues permite evaluar el desempeño del sistema en condiciones dinámicas. Mediante los simuladores, este desempeño se prueba usando perturbaciones determinísticas, como escalones o rampas. Sin embargo, en la operación real, los equipos se ven sometidos a perturbaciones que varían continuamente en patrones impredecibles, por lo que se requiere un simulador con capacidades estocásticas para evaluar el desempeño de los controladores en condiciones realistas. En este trabajo se muestra el uso de un simulador estocástico de una torre de destilación de tres componentes, construido en base a un macro de Excel, para determinar la mejor configuración de control de la torre. Se usan, además, árboles de decisión para considerar la incertidumbre sobre el tipo de perturbaciones que enfrentará el proceso.
Palabras clave:Simulación de procesos, torre multicomponente, control.
Introducción
La simulación de procesos es una herramienta muy usada en el diseño y control de plantas químicas, por lo que el perfil del Ingeniero Químico incluye habilidades en el uso de ambientes de simulación. A nivel educativo, los simuladores dinámicos encuentran una vasta aplicación en la enseñanza de la disciplina de control de procesos, puesto que permiten predecir el desempeño de los equipos bajo distintos esquemas de control y sintonías de los controladores. Típicamente, el desempeño de los controladores se prueba mediante perturbaciones tipo escalón, rampa o pulso, que son perturbaciones determinísticas, en el sentido de que tienen un comportamiento fijo y predecible (Roffel y Betlem, 2006). En la vida real, las perturbaciones son más bien del tipo estocástico, por lo que el uso de simuladores habilitados para manejar este tipo de perturbaciones preparará mejor al estudiante para su desempeño profesional.
El aprovechamiento de la simulación de procesos en la enseñanza del control de procesos está limitado por la ausencia de simuladores dinámicos gratuitos. Ante esto, la academia de Ingeniería Química del Tecnológico de Estudios Superiores de Coacalco ha desarrollado un simulador estocástico de una torre de destilación de tres componentes (Chew et al., 2023), con el objetivo de que pueda ser usado en prácticas educativas para alumnos de simulación de procesos y diseño de controladores. En este trabajo, se muestra un ejemplo de la aplicación de este simulador al problema de seleccionar el control de una torre de destilación.
Objetivo
Mostrar la aplicación del simulador estocástico de una torre de destilación de tres componentes, desarrollado en el Tecnológico de Estudios Superiores de Coacalco en la enseñanza de temas de simulación de procesos.
Materiales y métodos
Se usó el simulador de procesos cuya interfase principal se muestra en la Figura 1. La torre de destilación se alimenta con una mezcla de benceno, tolueno y p-xileno. Los controles ubicados en la parte inferior izquierda de la interfase permiten definir patrones de variación de la composición de entrada, pudiéndose escoger entre un valor constante o una distribución de probabilidad uniforme, triangular o normal de las fracciones mol de entrada. El simulador permite controlar la temperatura de un plato de la zona de rectificación manipulando la relación de reflujo de una torre con diez platos en total.
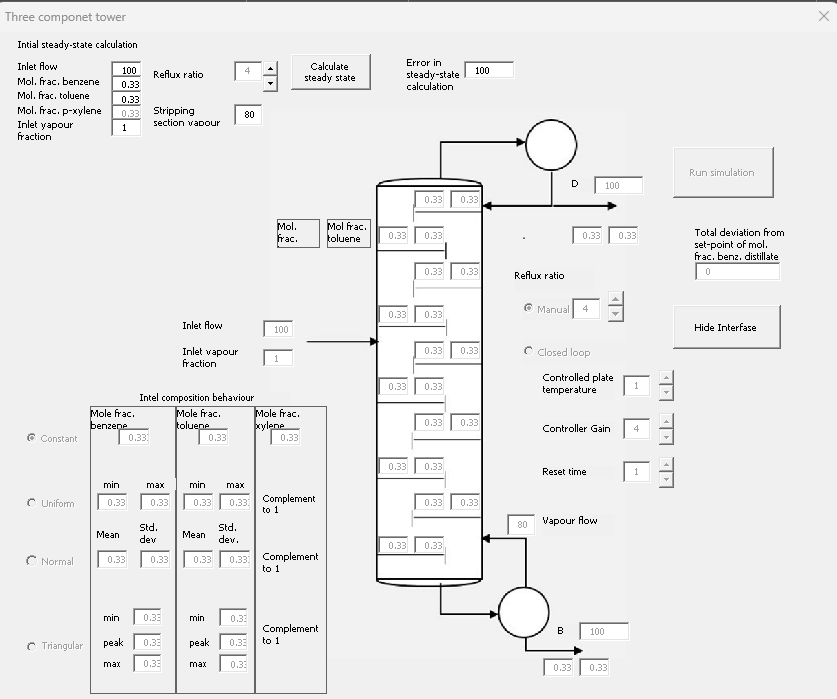
Figura 1. Interfase del simulador (Elaboración propia).
Para una fracción mol de 1/3 para los tres componentes en la alimentación, que se toma como estado estacionario, la Figura 2 muestra los perfiles de composición y temperatura en la torre.
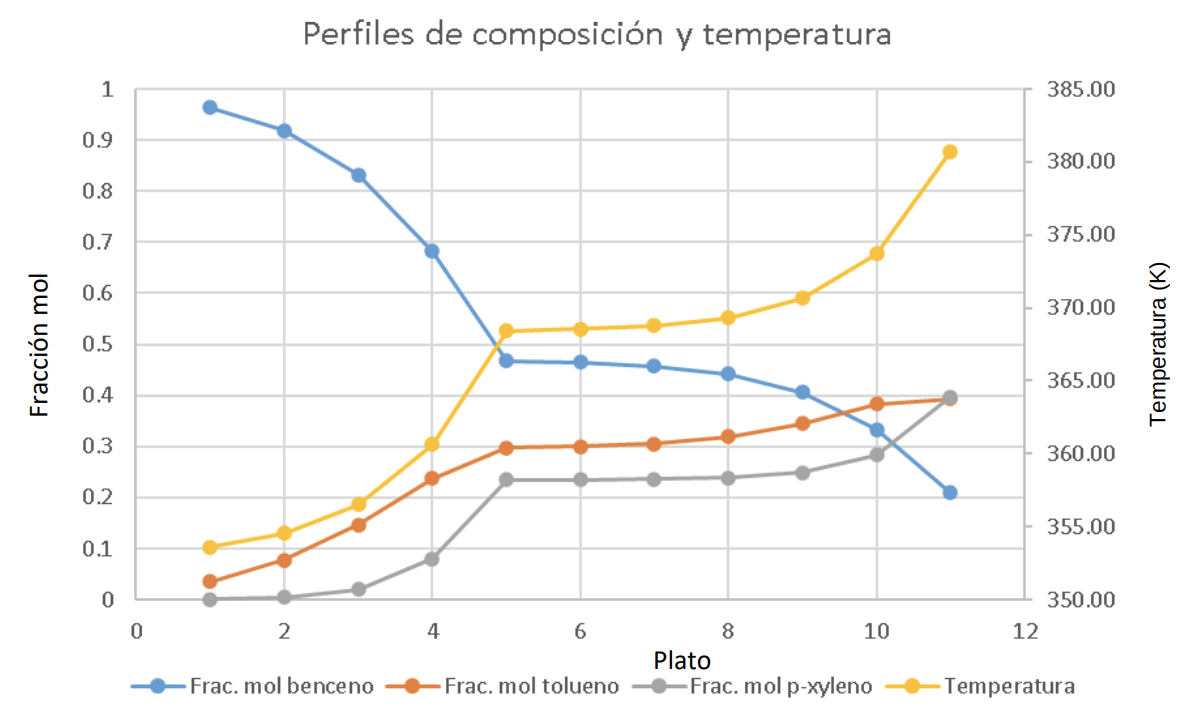
Figura 2. Perfiles de composición y temperatura en estado estacionario (Elaboración propia).
Resultados y Discusión
Se definen dos perturbaciones determinísticas, donde xB,A, xT,A y xX,A son las fracciones mol, respectivamente, de benceno, tolueno y xileno en la alimentación.
- DB=Disminución en la fracción mol de benceno de entrada, donde la composición de la corriente de entrada cambia a xB,A=1/6, xT,A= xX,A=5/12
- DT=Disminución en la fracción mol de tolueno de entrada, donde la composición de la corriente de entrada cambia a xT,A=1/6, xB,A= xX,A=5/12
El controlador se sintonizó tomando la temperatura del plato 1 como variable a controlar mediante la manipulación de la relación de reflujo, y simulando el sistema cuando este es afectado por la perturbación DB. Se consiguió una respuesta adecuada (Figura 3) con una ganancia proporcional del controlador de 40 y un tiempo de reset de 0.1.
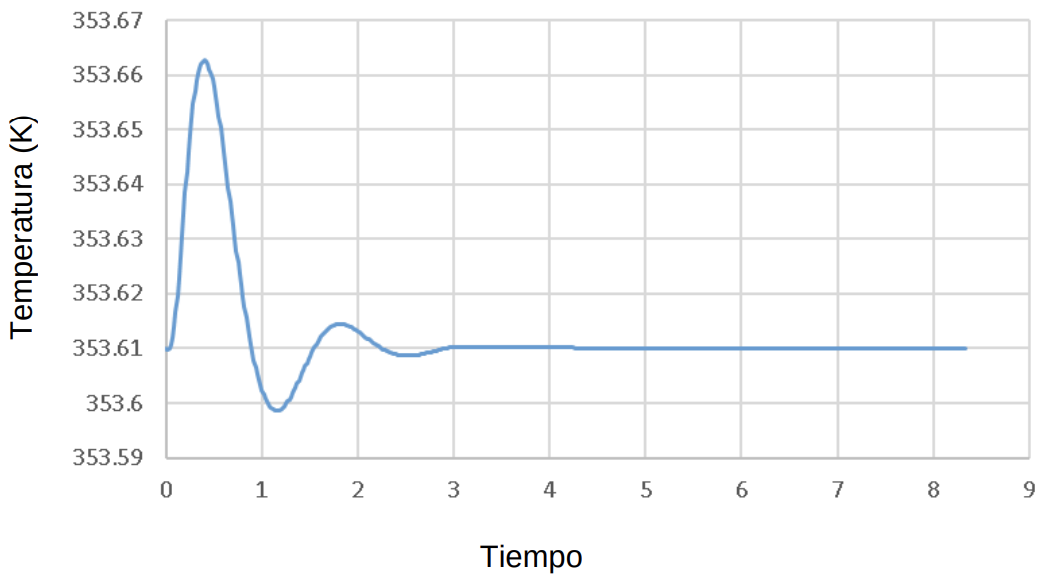
Figura 3. Respuesta de la temperatura del plato 1 a la perturbación DB (Elaboración propia).
En la Tabla 1 se muestra la suma del error absoluto de la fracción mol de benceno en el destilado respecto a su valor en estado estacionario, denominada ∆xB, si se presenta una disminución en la fracción mol de benceno de entrada (DB) para los casos cuando no existe control y cuando se controla la temperatura de un plato en la sección de rectificación.
Tabla 1. Perturbación DB= Disminución en la concentración de benceno (Elaboración propia).
Plato bajo control de temperatura |
Error en composición de benceno |
|---|---|
Lazo abierto (sin control) |
24.48 |
Plato 1 |
0.0750 |
Plato 2 |
0.5580 |
Plato 3 |
1.580 |
Plato 4 |
2.770 |
La Tabla 2 muestra la información correspondiente cuando se da una disminución en la fracción mol de benceno en la entrada.
Tabla 2. Perturbación DT= Disminución en la concentración de tolueno (Elaboración propia).
Plato bajo control de temperatura |
Error en composición de benceno |
|---|---|
Lazo abierto (sin control) |
4.12 |
Plato 1 |
0.260 |
Plato 2 |
0.0849 |
Plato 3 |
4.78 |
Plato 4 |
6.30 |
Se observa que, para ambas perturbaciones, el control de temperatura en los platos 1 y 2 produce menores desviaciones que el control de temperatura en los platos 3 y 4. También se observa que bajo la perturbación DB es mejor controlar la temperatura del primer plato, mientras que para la perturbación DT el mejor resultado es controlar la del segundo. Si no se sabe de antemano cuál perturbación ocurrirá, la selección del plato cuya temperatura debe ser controlada se convierte en un problema de toma de decisiones bajo incertidumbre (Clemen, 1996). La decisión se representa por el árbol mostrado en la Figura 4, donde C representa la decisión de que plato controlar (C1, y C2 indicando, respectivamente, el control de las temperaturas de los platos 1 y 2) y D la perturbación que se presenta, que puede ser DB, DT ó N, este último caso representando la posibilidad de que las composiciones de entrada se mantengan en su estado nominal. Las probabilidades de que se presente DB y DT se denominan, respectivamente pDB y pDT. Se denomina ∆xB(Di,Cj) la desviación observada en la fracción mol de benceno en el destilado bajo el control del plato j y la perturbación Di.
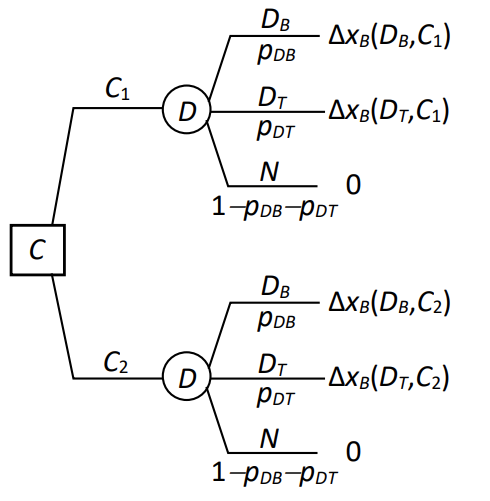
Figura 4. Decisión de qué plato mantener bajo control de temperatura (Elaboración propia).
Como se prefieren valores menores de ∆xB a mayores, la condición para preferir el control de temperatura en el plato 1 en lugar de la del plato 2 está dada por la ecuación 1
pDB∆xB(DB,C1) + pDT∆xT(DT,C1) pDB∆xB(DB,C2) + pDT∆xT(DT,C2) (1)
Que puede acomodarse como:
pDT(∆xB(DT,C1)∆xB(DT,C2)) pDB(∆xB(DB,C2) ∆xB(DB,C1)) (2)
En el caso analizado, el control sobre la temperatura del plato 1 se desempeña mejor que el control sobre la temperatura del plato 2 cuando sucede DB, y lo opuesto ocurre cuando se presenta DT. Esto quiere decir que:
∆xB(DT,C1) ∆xB(DT,C2) > 0 (3)
∆xB(DB,C2) ∆xB(DB,C1) > 0 (4)
Por lo que, la ecuación 2 puede acomodarse como:
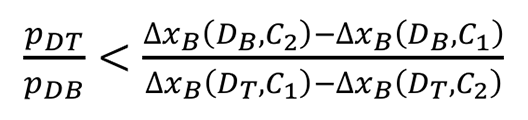
(5)
Si se sustituyen los valores mostrados en la Tabla 2, queda:
(6)
Que indica que la probabilidad de que se presente la perturbación DB debe más que el triple de la probabilidad de que se presente la perturbación DT para que sea preferible controlar la temperatura del plato 2 en lugar de la del plato 1.
Conclusión
En la vida real, los procesos deben enfrentar perturbaciones impredecibles, que varían de forma continua. Los controladores deben, por lo tanto, diseñarse para que se desempeñen bien contra este tipo de perturbaciones, por lo que el diseño de controladores basado en simulación requerirá de simuladores que manejen variables estocásticas. En este trabajo se ha mostrado el empleo del simulador estocástico de una torre de destilación multicomponente, construido localmente, para recomendar el plato cuya temperatura debe controlarse. En el caso estudiado, puede ser el plato uno o dos, dependiendo de la condición expresada en la ecuación 6.
Referencias
- Chew, H.M.L., Viveros, R.L., Pérez, T.J.R. (2023). A stochastic simulator of a multi-component distillation tower built as an Excel macro. Engineering, Technology and Applied Science Research. 13(2): 10222-10227. https://doi.org/10.48084/etasr.5563
- Clemen, R.T. (1996). Making Hard Decisions. Duxbury Press, USA.
- Roffel, B., Betlem, B. (2006). Process Dynamics and Control. John Wiley and Sons. Reino Unido.
Séptimo Congreso Nacional de Tecnología 16,
17 y 18 de octubre de 2024,
celebrado en formato virtual
D. R. © UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO
Excepto donde se indique lo contrario esta obra está bajo una licencia Creative Commons
Atribución No comercial, No derivada, 4.0 Internacional (CC BY NC ND 4.0
INTERNACIONAL).
https://creativecommons.org/licenses/by-nc-nd/4.0/deed.es
ENTIDAD EDITORA
Facultad de Estudios Superiores Cuautitlán.
Av. Universidad 3000, Universidad Nacional Autónoma de México, C.U., Delegación Coyoacán, C.P. 04510, Ciudad de México.
FORMA SUGERIDA DE CITAR:
Chew-Hernández, M. L., Gómez-Tagle, R. G., y Rodríguez-Figueroa, R. (2024). USO DE UN SIMULADOR ESTOCÁSTICO PARA ANALIZAR EL CONTROL DE UNA TORRE DE DESTILACIÓN MULTICOMPONENTE BAJO INCERTIDUMBRE. MEMORIAS DEL CONGRESO NACIONAL DE TECNOLOGÍA (CONATEC), Año 7, No. 7, septiembre 2024 - agosto 2025. Facultad de Estudios Superiores Cuautitlán. UNAM https://tecnicosacademicos.cuautitlan.unam.mx/CongresoTA/memorias2024/Mem2024_Paper05.html